RBE501 Course Project
By Sam Rooney
As WPI’s 2023 B term comes to a close, my graduate robotics courses come to a close as well. For these past two terms, I have been lucky to take one of WPI’s graduate-level robotics courses, RBE501: Robot Dynamics. We learned a lot more than “just” dynamics in this course, from new ways to calculate forward kinematics, to some perhaps unintended practical experience on how to make metal parts.
Before I start my wall of text, if you just want to see our report, presentation, and slides, here are the links! Link to project report, Link to presentation video, and Link to presentation slides. If you would like access to the CAD model, please contact me via email (which can be found with the other social links at the very top or bottom of this page!)
For most of the duration of this course, a group of 3 of us were assigned to work together to design a robot arm to solve a problem. These were myself (Sam Rooney), Ben Laman, and Liam Jennings (Liam has a website too!). Over the course of this project, we designed a 3-degree-of-freedom (i.e. 3 motor) robot arm based on target positions in a plane, determined the forward, inverse, and velocity kinematics formulations for this robot, and eventually solved the dynamics problem to determine the torques required to follow a path through the robot’s workspace.
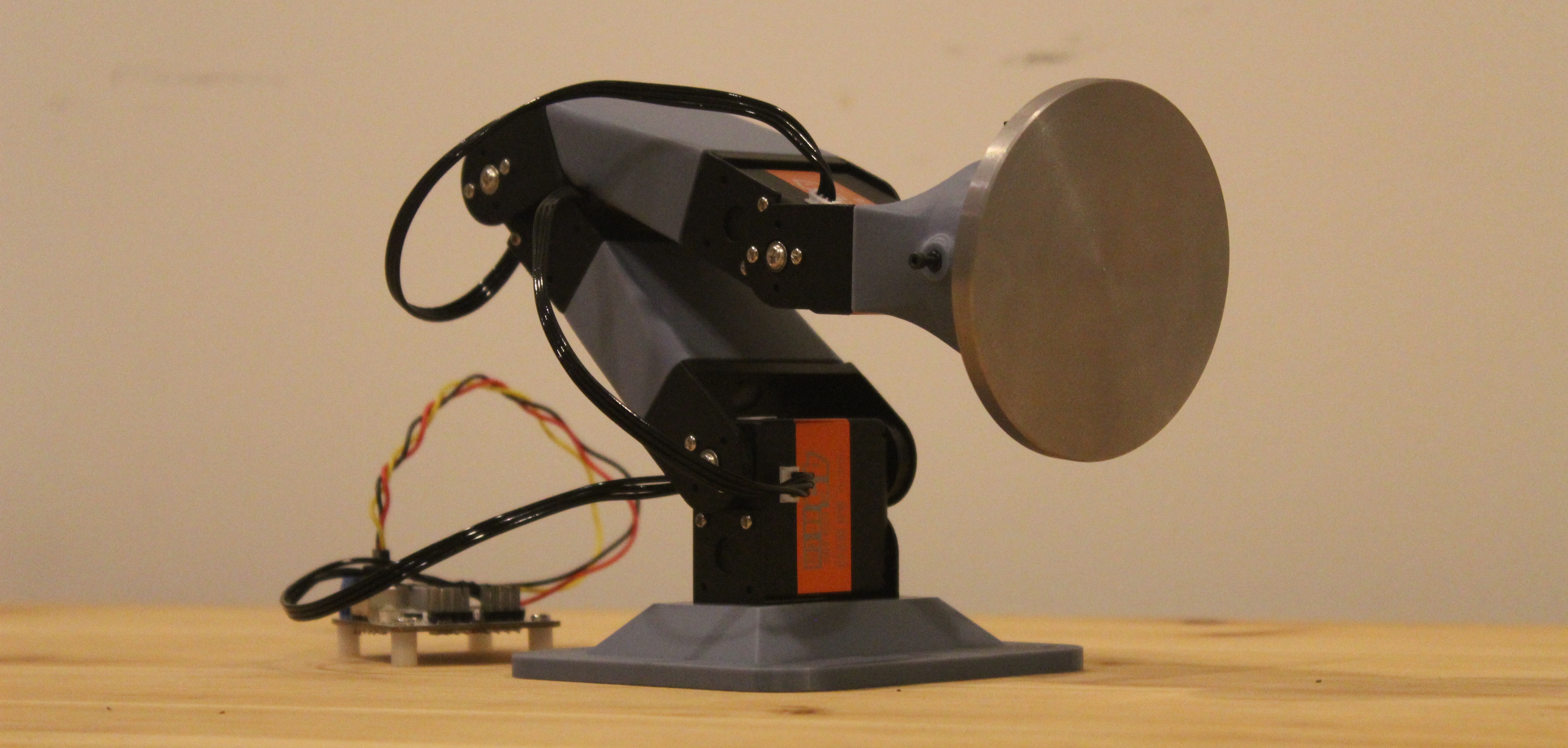
Together, we not only designed the robot as assigned, we even built a physical model of the robot to hold and work with in person. This was an unassigned challenge we posed to ourselves in order to demonstrate not only our ability to theoretically define a robot, but also to physically construct and work with it. Sadly, late in the term when all of our parts finally arrived, an electrical problem caused our servo controller board to be killed in action. While a new board is on the way, we were unable to complete our challenge to ourselves within the time span of the project.
I will eventually come back to this ignominy and complete the robot, but as time moves on and new courses are brought to the front of my mind, it may take some time. In the meantime, we were able to not only complete the chassis of the robot arm (which was constructed from 3D printed parts and purchased motors), we were also able to create a physical version of the payload out of mild steel.
Producing the payload involved locating, sawing to rough size, and lathing to precise dimensions a large piece of mild steel stock in WPI’s own Washburn Shops, which has a vast array of industrial machines to create parts with. It also involved getting trained to work in the machine shop, which allows me to use the hand tools and (under supervision) learn how to use the large machines, which not only includes CNC lathes, but also a plasma cutter, CNC machine tool, and a true industrial robot arm controlled by some Allen-Bradley hardware.